抢先试驾小鹏P7 XPILOT 3.0,我愿称之为绝活
10月24日,小鹏汽车在华南理工大学举办了第二届小鹏汽车智能科技日,现场通过视频展示了小鹏NGP与特斯拉NOP在相同路段下的对比。看过去年放出的NGP测试和前两天的NGP对比,我估计很多人都在等小鹏NGP的实际体验吧?

请容小侦探我插个腰——咱体验了!就在1024科技日之前,我作为提车三个月的P7车主,前往广州南沙,和小鹏的工作人员一起“开”了一把带NGP的小鹏P7(参数|询价)。作为车主,我现在已经按捺不住激动的心情,想和大家分享NGP的实际体验!
【严肃声明】
1. 以下所有内容,均基于小鹏NGP工程版,不代表未来的正式版本;
2. 当前车内大屏显示为工程测试版,实际效果以最终发布版本为准;
3. 以下所有体验在工作人员监督下进行,请勿擅自模仿,注意交通安全。
由于工作经历,我在体验NGP之前,已经体验过的较高级别自动辅助驾驶技术包括凯迪拉克Super Cruise、特斯拉AutoPilot以及蔚来NOP。按理说,“久经战阵”的我应该早就见怪不怪了吧,可没成想打开小鹏P7的NGP之后,我发现NGP的表现依旧可以用炸裂形容!
下面,我就从感知、决策、交互3个方面来跟大家讲讲NGP的实际体验。
■ 感知层面

感知层面,NGP对于周边车辆的感知是比较准确的。在车内大屏的工程画面中,车辆的形态、相对位置都有直观的展示,从上面的现场体验照片中可以看到,车辆至少同时感知到了10台车外加锥桶的存在,并显示于工程画面中。当然,仪表盘上由于需要照顾观感,因此只显示出P7前方几台关系最密切的社会车辆。

我们驾驶的工程版NGP试装车,能够将前方隔着很远的社会车辆都感知到,个人猜测是融合了摄像头和一定的模糊算法,这对于下面要讲到的驾驶决策至关重要。
感知是基础,决策则直接影响到车辆带给人的体验,这也是我认为小鹏P7于其他竞品相比最不一样的地方。需要说明的是,P7的车主,千万不要以当前XPILOT 2.5的表现去推测NGP的表现!至少就我目前体验的工程版NGP而言……
NGP的大部分逻辑判断,已经非常接近人了!
举个例子,比如你被一台车压得很慢,大概60公里/小时,左边车道有一台平稳超过你的社会车,此时小鹏P7会提前打左转向灯,在那台车超越一定距离后,迅速并入左侧车道!这还没完,并线过程中,我能明显感受到NGP会对车速进行精确控制,并线时稍稍提一点车速,并线后再根据前车车速迅速做出反应,平稳提速!
远距离判断超车,自动并线提速
并线加速,这是很多司机都没有意识到的良好驾驶行为,NGP对此的领悟颇深啊!关键整个过程如丝般顺滑,与驾驶员对动力需求的主观判断高度吻合,并没有出现顿挫、犹豫不决的情况。另外,NGP的决策提前量比较大,路况明朗的时候,NGP不会让P7咬到慢车屁股才开始并线超车,而是在离前方慢车50米开外,就已经判断好自己要不要并线了。

匝道中按照导航自动选择路口
高速出匝道,以及匝道中选择路口时,就如同之前小鹏放出的演示视频那样,NGP可以有效识别路面上绝大部分的标示线,并不会出现实线并道这种错误动作。当然,如果遇上出口车流密集,NGP实在并不进来,系统也会提示驾驶员接管车辆。在匝道上,车辆会按照匝道限速适当进行降速,总体上会把车速控制到一个比日常驾驶稍慢的速度。

并线的同时,应对近距离超车
被超车的时候,NGP表现得很“淡定”。比如上图中一辆白色SUV超车并入本方所在车道,我从车内并没有察觉P7有明显的制动,车速一直保持在74公里/小时左右,NGP判断这台车不会造成影响,于是继续执行自己的并线操作。这也和我自己开车时候的判断和行为是一致的。
交互层面,这里能体现出NGP人性化的一面。首先是主动提醒,小P在并线前会主动告知驾驶员“即将向左/向右超车”,这与蔚来NOP比较相似。更重要的一点是,目前已量产的高等级辅助驾驶,比如特斯拉AP和蔚来的NOP,绝大多数仅有1种驾驶风格。

但小鹏不一样,工程师透露,将来的正式版NGP中,会有“标准”和“积极”两种驾驶风格,我试驾的工程版属于“积极”。未来,小鹏还会开发一个策略相对柔和、保守的“标准”模式出来。毕竟不同的车主驾驶习惯也不一样,两种驾驶风格让车主自己去选择,这一点小鹏做得还是很人性化的,但要付出更多的研发精力。
■ 综合体验小结
说实话,我喜欢这个“积极”风格,因为和我自己的开车习惯真的太像了,那种我想怎么做,不用动手,车就会按照我的想法去执行的感觉——真的太合拍了,这种快感是目前市面上其他ADAS车型身上所体验不到的,是另一种人车合一的“爽感”。

结合特斯拉NOP和蔚来NOA的体验,我主观上给三者做个排序:
主动提醒频率:蔚来>小鹏>特斯拉
变道频繁程度:特斯拉>小鹏>蔚来
动力线性体验:小鹏>蔚来>特斯拉
我这里无法断定谁的综合体验更好,特别是小鹏的NGP尚处于工程阶段,真正OTA之前还会做很多细节优化,比如仪表盘动画的显示效果等等。
另外,试驾中也遇到了一些尚待解决的“世界性难题”,例如当P7要向某条车道并线,此时隔一条车道与其平行的社会车也想并进来,这种“量子纠缠”的情况是需要人工干预的。

还有一些突发情况需要驾驶者判断。比如前方施工,临时立了个限速牌,此时车辆不会将该信息融入计算。在NGP的决策层级中,限速信息优先从高精度地图采集,毕竟临时限速牌花样繁多,甚至有施工完毕不撤牌的情况,系统真的很难搞定。这也就是为什么,NGP专门有一个摄像头用来监控驾驶员的注意力是否集中在前方路面。
■ 总结
既然您已经耐心看到这里,那我就再留个悬念。我们知道,NGP通过14个摄像头、5个毫米波雷达、12个超声波传感器获取环境信息,再融合厘米级高精度定位和分米级高精地图,英伟达Xavier计算平台提供算力加持。但我体验到的工程版NGP,其实还不是小鹏XPILOT的“完全体”……
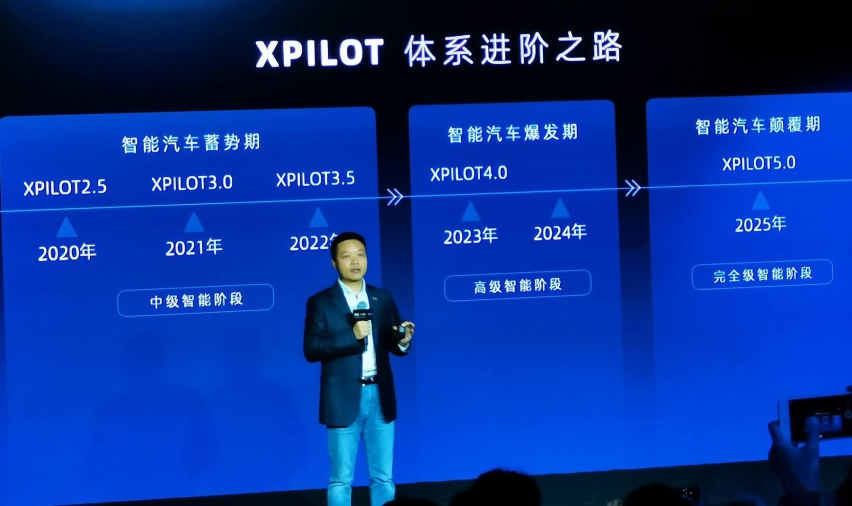
小鹏的这些传感器中,至少还有一个长焦摄像头没有调用!据工程师透露,小鹏P7曾在夜间测试中遭遇大雨,但仍比较顺利地跑下来了。想想吧,现在的工程版NGP已经强至如此,等所有的传感器信息融合到计算平台中……那得是多可怕的成长潜力啊!按照1024科技日上面小鹏给出的XPILOT进阶规划,现在选择P7 XPILOT 3.0版本的车主真的是赚到了,在通向自动发展的道路上,你的车拥有超强的成长空间!
好了,就到这里吧,我去哭会儿,我买的是XPILOT 2.5……