XCX-Pilot Test 3 蔚来ES8的辅助驾驶系统
进入 2020 年,“智能电动车”的概念被越来越多的用户所认识,以特斯拉为代表的,市面上也开始出现带有“智能化”属性的车型。什么才是智能?目前比较达成共识是具备可迭代升功能、让车辆常用常新可称之为“智能”。为了给大家带来更加专注于智能电动车的评测内容,新出行最近也推出了“一大”+“三小”的全新评测体系。

评测体系中的“一大”代表的是新出行综合评测,也就是我们之前一直坚持的专注于新能源车的深度体验报告;而“三小”则是: XCX-Test 续航测试、XCX-IC Test 智能座舱测试、XCX-Pilot(参数|询价) Test 自动驾驶测试,是基于智能电动车的专属评测项目。未来所有大家关注的所有重磅新能源车,我们都第一时间会带来“一大”+“三小”的评测内容。

大家都知道目前市面上也有越来越多的车型都配备了自动辅助驾驶系统,很多用户都表示这是一项“旦用难回”的功能。与 XCX-Test 续航测试标准一样,新出行一直也在探索一套自动辅助驾驶系统的测试标准,通过这套测试标准,能让用户直观的了解各品牌的自动辅助驾驶能力是什么水平,同时也希望能让更多的普通用户认识自动辅助驾驶、正确的去使用它。最终,我们制定了新出行自己的测试标准—— XCX-Pilot Test 。

今天给大家带来的是第三篇 XCX-Pilot Test 文章,这次的主角是蔚来 ES8。接下来就让我们看看这台车的辅助驾驶系统在 XCX-Pilot Test 中的表现究竟如何。
目录

一、测试车型硬件信息
关注新能源车的朋友可能已经注意到,现在的新能源车越来越像一台数码产品。我们在测试一台新能源车的辅助驾驶系统时,其实硬件和系统版本都是必不可少的环节。所以每一篇 XCX-Pilot Test 的开头部分,我们都会对测试车辆的版本和硬件信息进行介绍。

车型:蔚来ES8(参数|询价)
软件版本:NIO OS 2.6.5
芯片:Mobileye EyeQ4 视觉芯片
毫米波雷达:5 个毫米波雷达
超声波雷达:12 个超声波雷达
摄像头:7 个摄像头(1 个三目摄像头+ 4 个 360° 泊车摄像头)
蔚来ES8 的硬件水平在 2020 年属于中间梯队,5 个毫米波雷达+1 个三目摄像头构成了主要的硬件配置。全车支持 OTA升级,我们这台试驾车目前的版本是最新的NIO OS 2.6.5。
二、辅助驾驶系统交互

对于辅助驾驶系统来说,除了车辆的硬件之外,辅助驾驶系统的交互也是我们重点体验的地方。比如系统的开启方式、系统开启提醒、系统退出提醒、用户接管提醒、仪表盘上其它车辆的状态等我们都会直观的展示出来。
2.1 开启步骤

NIO Pilot自动辅助驾驶系统开启方式很简单,方向盘左侧多功能按键区中间的按键就是NIO Pilot的开关按键,当按下按钮后,系统会发出提示音,另外仪表盘里的小车模型会出现“动感光波”一样的动画效果。当车道线变为实线时,代表车道居中正式启动。
2.2 系统开启提醒

辅助驾驶系统开启之后,会有“Pilot 已启动”的语音提示驾驶员辅助驾驶已经开启,仪表盘有三个变化:1. 显示蓝色车道线(识别到路面清晰车道线时)、2. 左下角NIO Pilot车辆环视感知的小图标变为蓝色、3. 速度线下方指示条变为蓝色。
2.3 系统退出提醒
当驾驶员主动踩踏刹车踏板时,辅助驾驶系统退出,系统会有“Pilot 已退出”的一声提示辅助驾驶退出,而且仪表盘不再显示蓝色车道线。而除了这种辅助驾驶系统完全退出的场景之外,若 NIO Pilot 自动辅助驾驶系统没有办法识别准确的车道线、弯道曲率过大或者是驾驶员脱手时间过长,系统便会退出。
2.4 用户接管提醒
目前的 L2 级别辅助驾驶系统只能算一个辅助功能,不能完全代替人类驾驶员。所以系统在遇到无法处理的复杂场景时一般都会发出用户接管提醒。蔚来ES8 的方向盘是转矩感应的设置,当系统给出“请握住方向盘”的警示时,驾驶员需要转动一定的角度。

所以我认为这个地方算是一个 BUG,对于习惯了握力感应的驾驶员,在听到这种提示音的时候就会很诧异——明明自己的双手好好的握着方向盘。或许这个中文的提示语可以改为“请轻转方向盘”。
2.5 仪表盘对其它车辆的显示
蔚来 ES8 的仪表盘可以显示普通车辆、行人、自行车/摩托车、货车等车辆,系统欠缺了对于侧后方车辆的识别能力,默认显示是同向三车道。但是在照明条件足够好的部分场景下,车辆可以识别包括目前行驶车道在内的五条车道线。系统对于识别到的车辆使用的是浅灰的图标,当系统把前车当做目标车进行跟车时,图标会变为深灰色。

默认显示是同向三车道

识别横向穿行的电动车
值得表扬的是,在蔚来 ES8 上,系统还可以显示横向穿行的电动车。这种 UI 图标的丰富度是比较少见的。
交互环节体验总结:在这个环节,蔚来 ES8 的系统 UI 界面的设计比较美观,系统提示驾驶员接管时带有中文语音,可以在任何系统无法 100% 处理的场景及时的告知到驾驶员。另外,仪表盘对其它车辆的显示也比较准确,唯一就是系统对于目标车辆的区分采用的是深灰以及浅灰的方案,显示有些不够明显,如果把两种状态的车辆图标换为不同的颜色可能会更加醒目一些。
三、城市路况体验

现阶段,由于技术的局限,城市路况辅助驾驶系统的体验其实并不是特别好,自动辅助驾驶功能在应对普通的多红绿灯、环境复杂的城市路况能力非常有限。在这个部分我们会根据红绿灯城市道路以及快速路、环路分别体验系统启动时的速度设定逻辑、通过无标线十字路口车辆的反应、大曲率圆弧弯道的车道保持能力、红灯前有静止等灯的车辆等场景进行体验,主要展示各车型的辅助驾驶系统在现实路况里的具体表现。
3.1 系统启动时的速度设定逻辑
全速域自适应巡航功能可以缓解拥堵路况和高速时的驾驶疲劳,是最常用的一个功能。在开启这个功能的时候,如果车速低于 30km/h,系统设定的默认为最高速度为 30km/h;而在车速大于 30km/h 时,系统设置的最高车速限制为当前车速。

通过轻按多功能方向盘的按键,能以 1km/h 为单位调节跟车最高限速值,长按时能够以 5km/h 为单位调节跟车最高限速值。蔚来 ES8 的这种细节设计让强迫症患者非常舒服,喜欢哪种操作方式就能使用哪种。
3.2 通过无标线十字路口
开启辅助驾驶系统之后,在城市路况通过无标线十字路口是一个常见的场景。蔚来 ES8 在这个项目里,如果没有跟随前车,系统识别不到车道线的时候,车道居中会退出。而当前方有跟车的时候,系统可以跟随前车的轨迹通过十字路口。
需要注意的是,在跟随前车的轨迹时,车辆可能会出现变更车道的情况。这个时候,车辆是没有办法识别侧面的道路环境的。所以在经过无标线十字路口时还是建议驾驶员时刻关注道路情况,及时接管,避免意外事故的发生。
3.3 大曲率圆弧弯道
除了全速域跟车之外,L2 级别的辅助驾驶系统还有一个标志性的功能就是车道居中。辅助驾驶系统可以自动识别车道线,自动纠正偏离,使车辆稳定行驶在车道中间。对于常见的场景,这个功能遇到的最大的挑战就是遇到大曲率圆弧弯道时能否保证车辆依然可以稳定的行驶在车道中间。
所以在大曲率圆弧弯道这个项目我们选择了一段 360° 的环形匝道,速度设置为 35km/h 时进入,第一次没有顺利通过弯道,车道居中功能退出,需要驾驶员接管。
随后我们将速度降低到 30km/h,这次蔚来 ES8 通过了大曲率圆弧弯道。不过在多次尝试之后,系统并不是每一次都能顺利通过。总的来说,对于 LCC 这项功能,蔚来的策略比较保守。
3.4 通过标线混乱的路段
对于蔚来 ES8 来说,标线混乱的路段时系统没法准确找到自己所在的车道,这种情况下,系统会提示驾驶员接管方向。另外,在长时间使用 NIO Pilot自动辅助驾驶系统之后,我们发现,在夜间光线不太好的时候,蔚来 ES8 对于车道线的识别能力也会打折扣。如果开启远光灯也无法识别隔壁车道的时候是没有办法使用转向灯变道功能的。
3.5 红灯前有静止等灯的车辆
在红灯前有静止等灯的车辆时,蔚来 ES8 可以识别到前车,并且自动跟停。官方给出的数据是在 5 秒内可以保持跟车起步,超过 5 秒则需要驾驶员点一下加速踏板。
在测试中,我们还找到一个拖挂车的拖厢。在测试里,蔚来 ES8 同样可以识别到静止的拖厢。这种表现是超过我们的预期的。这种极端的例子也表示蔚来 ES8 对于静态物体的识别能力比较出色。
城市路况体验小结:蔚来ES8 的 NIO Pilot 自动辅助驾驶系统在城市里的表现符合我的预期,NIO Pilot 在大多数的场景里的表现都比较稳定,跟车加速和刹车都比较柔和。但是在复杂的场景里,比如大角度的弯道或者是车道线不清晰的场景下,系统还是比较保守,倾向于让驾驶员主动的接管。
四、高速路况体验

高速路况测试环节,我们针对现阶段部分车型打灯变道功能进行测试评价,看看打灯变道启动速度是多少、打灯变道后是否能自动取消变道灯、后方有车加速驶来是否能成功变道等场景进行模拟。让大家对于车辆的辅助驾驶系统功能的能力有一个清晰的认知。如果车辆带有接近 L3 级别辅助驾驶系统的NOA 功能,高速路况这种场景我们也会进行实际体验。
4.1 打灯变道启动速度
蔚来 ES8 的这个功能的启动速度官方数据是在车速超过 50km/h 之后才能开启,对于路面的标线,在系统识别为实线的时候,打灯变道功能无法工作。不过在我们实际的体验中,有时车速在 45km/h 的时候也可以变道,但并不是没次都可以,不知道是否存在系统 BUG。
4.2 打灯变道后是否能自动取消变道灯

对于这个项目,蔚来ES8 不可以自动取消转向灯,需要驾驶员手动取消。
4.3 后方有车加速驶来是否能成功变道
蔚来 ES8 车尾后方有配备毫米波雷达,遇到后方有车加速驶来这种情况,蔚来 ES8 大多数情况可以成功识别来车,并不会完成变道。此时,仪表盘会用醒目的红色提示驾驶员,后方有车。在后车超车并驶离一定距离之后,仪表盘上的转向动画会变为绿色,系统会自动变道。
但是需要注意的是,现阶段的辅助驾驶系统即使配备毫米波雷达在感知方面也并不是万能的。在使用转向灯变道的时候,还是需要驾驶员主动观察后视镜,确定后方安全。
4.4 隔壁车道有车同时变道时的场景
这种极端场景下,蔚来 ES8 并不能识别到侧面车辆的变道动作,车辆在开启变道之后,可能会发生碰撞事故。这种场景也是目前没有做到完全 360° 感知之前,辅助驾驶系统没有办法处理的极端场景。现阶段的硬件条件下,如果使用转向灯变道功能,需要驾驶员谨慎观察道路情况,主动接管方向盘,而不是“脱眼”+“脱手”,过度依靠辅助驾驶系统。
4.5 目标车道前方有慢车时的场景
另外,我们也测试了在目标车道前方有慢车时,使用转向灯变道的功能。这种情况下,蔚来ES8 在变道之后可以识别前车,并且主动减速。表现相比之前我们体验的理想 ONE 以及威马 EX5-Z 要好不少,制动及时,制动力也比较足。
高速路况体验小结:高速路况体验下来,大家比较在意的打灯变道功能我们也算全面的进行了测试。和我们预期相符合的地方是蔚来ES8 对于后方车辆的检测能力相比没有后部毫米波雷达的理想 ONE 会更加出色。另外在目标车道前方有慢车时的场景,蔚来ES8 也可以比较及时的识别到前车,几乎不需要驾驶员接管。但是在更高阶的辅助驾驶系统到来之前,转向灯变道功能还只是一个辅助功能,在大多数情况,使用这项功能时还是建议驾驶员谨慎的观察后方路况,而不是“脱眼”+“脱手”。
五、脱手检测

现阶段的辅助驾驶系统都只是为了缓解驾驶员疲劳的功能,而不是可以完全“脱手”、“脱眼”的自动驾驶。所以脱手检测是非常重要的一个功能,在蔚来ES8 上,系统是通过方向盘的转动力矩,检测驾驶员是否脱手。
5.1 脱手警告

第二级提示时,仪表盘上的文字提示会变为“请立即握住方向盘”
在驾驶员双手离开方向盘之后,30 秒左右系统会发出第一次警告,和其他车型不同的是,在蔚来ES8 上系统是发出“请握住方向盘”的中文提示音,仪表盘会出现红色的带“请握住方向盘”文字框的警示。另外系统每相隔 5 秒左右会再次警示,第二级提示时,仪表盘上的文字提示会变为“请立即握住方向盘”,提示音也会更加急促。最后一级的警示系统会发出“立即接管车辆,Pilot 已退出”的语音提示,系统完全退出。
5.2 脱手时长
脱手 30 秒左右发出警告,脱手 40 秒左右系统退出。
5.3 脱手惩罚
在脱手警告后如果依然没有接管,系统会自动退出。退出之后并没有惩罚设定,只需要重新按一下辅助驾驶按键就可以重新开启系统。
脱手检测环节小结:脱手检测方面,蔚来 ES8 的表现让人比较满意。脱手的提示及时,而且系统带有多级的语音提示,非常人性化,警示效果也比较好。关于系统在自动退出之后并没有设定惩罚机制这个情况,不同的用户可能有不同的理解。从实际使用来说,即使有惩罚机制也只能起到提示作用,使用辅助驾驶系统还是需要驾驶员自觉做到不脱手的使用。
六、场地模拟测试
场地模拟测试环节,我们会测试一些日常用车中比较少见但依然会存在的场景。在保证安全的前提下,给大家展示车辆的辅助驾驶系统在这些场景下的实际表现,方便大家有一个更加贴近现实的认知。
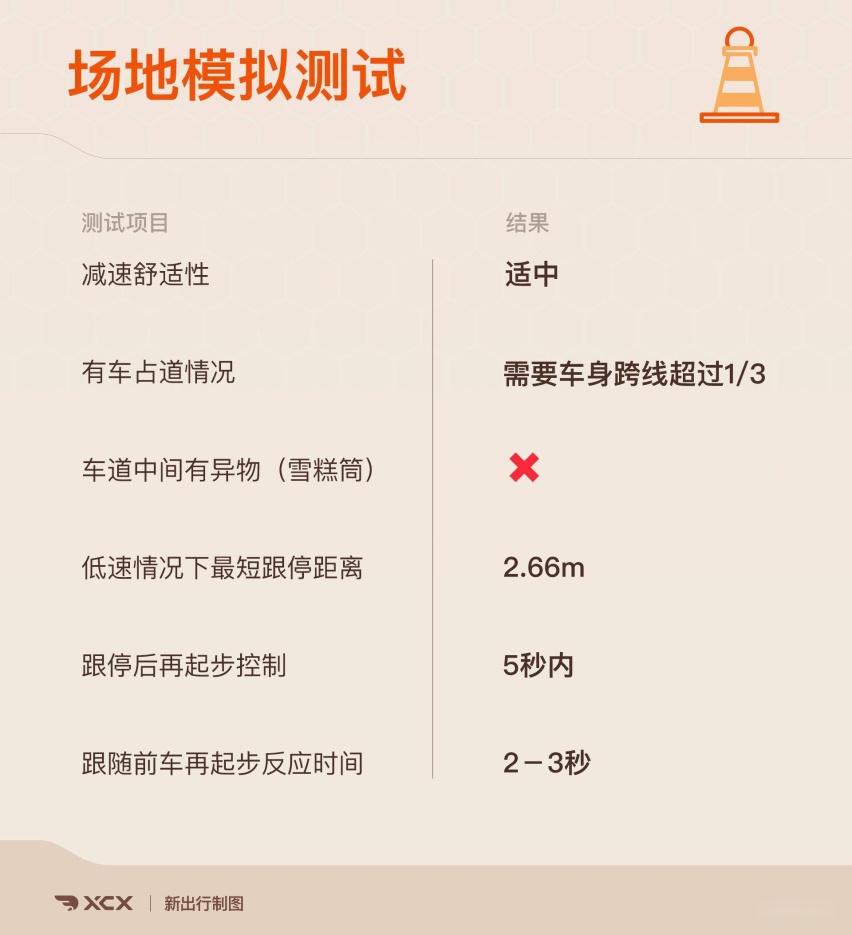
6.1 减速舒适性
前方有静止车时,识别和减速的动作很柔和。
在使用场景最多的自适应巡航功能中,蔚来 ES8 跟车减速的制动力度均匀,如果前车是慢慢的减速,车辆会缓缓制动直到完全刹停,车内乘客的乘坐舒适性比较好。
6.2 有车占道情况
很多人都遇到过车道边有车辆占道停车的情况,这种场景下,在开启辅助驾驶系统之后,蔚来 ES8 可以很好的监测到静止的车辆,并且会自动刹车降低车速。实际测试中,只要车辆越线超过三分之一的车身,蔚来 ES8 就可以监测到车辆。
在遇到车道上出现电单车的时候,蔚来 ES8 也可以精准的识别到。在这种情况下,车辆会把电单车当成前车,并且保持相应的距离,降低车速。
除了路边的占道车辆之外,在遇到“加塞”的情况,蔚来ES8 也可以比较及时的识别到前车的动作,进行主动减速避让。我们一共模拟了 3 种场景:
前车普通切入
首先是最常见的野蛮“加塞”到车道正前方减速,这个场景蔚来 ES8 可以比较及时的识别到前车并且制动。不过在加塞切入的间隔比较近的时候,蔚来 ES8 的 NIO Pilot 自动辅助驾驶系统可能会出现反应不及时的情况。
前车压线切入
第二种场景是车辆想加塞,但是处在犹犹豫豫的状态,而且“骑着车道线”减速,这种情况下蔚来 ES8 也可以识别到横跨车道线的前车,并且根据前车减速的动作进行制动。
6.3 车道中间有异物(雪糕筒)
在模拟车道中间有异物的场景里,我们借用了雪糕筒为参考。在实际测试中,蔚来 ES8 并不能监测到雪糕筒,车辆也不会制动或是躲避。
6.4 低速情况下最短跟停距离
模拟城市路况走走停停时的场景下,蔚来 ES8 大多数情况下跟停距离适中,不太容易被加塞。在不同的档位我们也进行了多次测量,多次测量数据分别为:3 米 50、3 米 38、2 米 66、3 米 00、3 米 24。在最极限的情况下,跟停的最短距离为 2 米 66。

需要注意的是,低速情况下最短跟停距离其实与跟车距离的档位关系并不是那么大。影响跟停距离的其实还是车速、前车的刹车力度。特别是前车的刹车比较急的时候,跟停距离会比较短一些。
6.5 跟停后再起步控制
蔚来 ES8 在跟随前车停车 5 秒内可以跟停起步。在实际测试里,表现与官方数据一致。停车超过 5 秒后再次起步需要驾驶员踩踏加速踏板。关于这种情况,工程师的解释是担心车辆停车时间较长时,出现行人穿行或者是电动车穿行的场景,为了安全需要驾驶员踩踏加速踏板车辆才会重新起步。
6.6 跟随前车再起步反应时间
在封闭路段,我们找到了两台车,模拟红绿灯跟车停车以及起步的场景。在前车起步之后,蔚来ES8 只需要 2 秒左右即可自动起步,不过由于蔚来ES8 只在跟随前车停车 5 秒内可以跟停起步。所以大多数情况下,红绿灯停车后还是需要驾驶员自己点一下加速踏板。
场地模拟测试小结:场地模拟测试环节,蔚来 ES8 面对极端场景的表现可能会让有些读者觉得不够给力。其实在日常使用中,无论是面对加塞还是面对有车占道情况的情况,蔚来 ES8 对于车道前方的识别以及制动响应都很稳定。只是工程师对于NIO Pilot的设定比较保守,在多次测试不同品牌的车辆之后,我们也更加坚定我们之前设定的规则,不会给对应项目打分,而是把测试的结果直接展示出来。
蔚来ES8 的 XCX-Pilot Test 测试总结

蔚来 ES8 的辅助驾驶系统,并不是像特斯拉那么激进。这套系统的基础功能在大多数日常使用场景下是非常合格的,而且系统的提示交互部分是目前市面上车型中体验几乎是最人性化的。不过随着大家对于辅助驾驶系统的要求越来越高,有些复杂场景下,蔚来 ES8 的表现还存在提升的空间。
蔚来 NIO Pilot的未来规划
1、蔚来现有车型未来还有什么功能升级吗?
未来 NIO Pilot 将新增的一个重要功能是自动辅助导航驾驶(NOP),可以按照你导航设定的路线,实现进出匝道、超车、并线以及巡航等功能。
2、NIO Pilot 辅助驾驶系统的未来规划。
蔚来目前正在研发第二代平台。该平台中,蔚来将跳过L3级别自动驾驶,直接研发L4级别自动驾驶。
结语
蔚来的 NIO Pilot 辅助驾驶系统在交互上给我的印象比较不错,日常实际的体验符合豪华品牌的定位。但是在极端场景,系统的设定比较保守。希望后期工程师可以进一步优化 ALC 的使用体验,我们也期待蔚来的自动辅助导航驾驶(NOP)早日 OTA。















