丰田申请新型四轮转向专利,原地掉头、平移停车不是梦
一直以来,汽车都在致力于从被动向主动的技术转变,四轮转向技术更在上世纪初就被提了出来,并且还被美国应用进二战时期的部分军用车辆和工程车辆之中,改善低速灵活性。在后来的发展中,四轮转向技术虽然又得到突破,但是还因一些问题无法解决,未能得到普及。最近,丰田又向美国专利商标局申请了一项四轮转向技术,似乎为这项技术的普及打开了一条新思路。
四轮转向技术的两种偏转规律
一般来说,四轮转向技术根据行驶条件的差异,前后车轮可出现不同的转角角度,帮助车辆更好的过弯或变道。
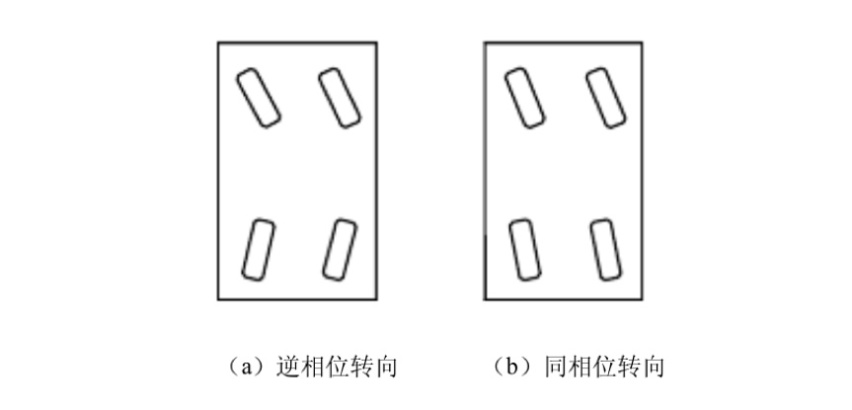
在低速转弯或方向盘转角较大的情况下,前后车轮呈逆相位转向,偏转方向相反,后轮角度通常还会随着转角增加,在一定范围内增大(一般为5°),进而缩小车辆的转弯半径。在环境复杂的越野道路、狭窄小路、停车等场景中,逆相位转向可以有效提升车辆灵活性。
高速状态下,四轮转向技术改为同相位转向,偏转角度相同,但由于这时车速提升,后轮的偏转范围远小于逆相位转向(一般为1°)。采用同相位转向的车辆,可使高速行驶时的车身横摆角速度减小,有效抑制车身发生动态侧偏的倾向,提升操控稳定性。
早期四轮转向技术仅有转角随动型机械结构,前后车轮恒定为逆相位转向,因为这种状态仅适合低速场景,严重影响高速稳定性,所以只有一些军用车辆和工程车辆应用。随着后期技术的发展,又研发出车速感应型四轮转向技术,可以根据车辆速度的不同,实现逆相位转向与同相位转向两种偏转规律。
四轮转向技术为何得无法得到普及?
相比普通的前轮转向汽车,四轮转向技术可以有效提升低速灵活性与高速稳定性,看起来是十分完美的方案,但是因为要通过切换两种不同偏转规律,才能实现这项效果,所以需要精准判断道路场景与驾驶员意图。
传统四轮转向技术的主要依据车速判断,低速逆相位偏转,高速同相位偏转,但方式仍过于粗糙,依然存在弊端。
这也是目前限制四轮转向技术发展的最大难题,所以目前乘用车采用的四轮转向系统通常放弃逆相位偏转,将重点放在提升高速稳定性上面。低速时汽车仅依靠前轮转向,车速超过某一限定速度后,后轮才参与进行同相位偏转。不过,由于这种方案的使用场景有限,目前主流的电控液压动力系统还在灵活性、准确性方面受到限制,未能得到普及。
丰田的四轮转向技术
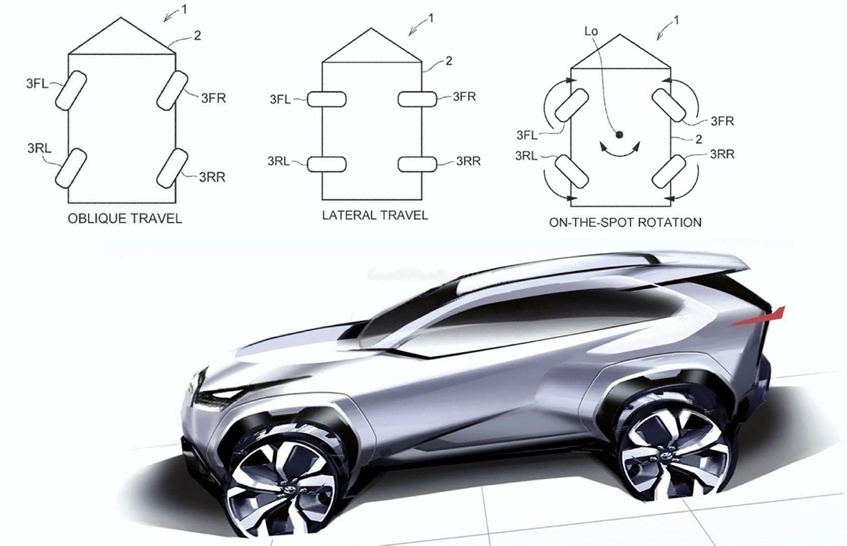
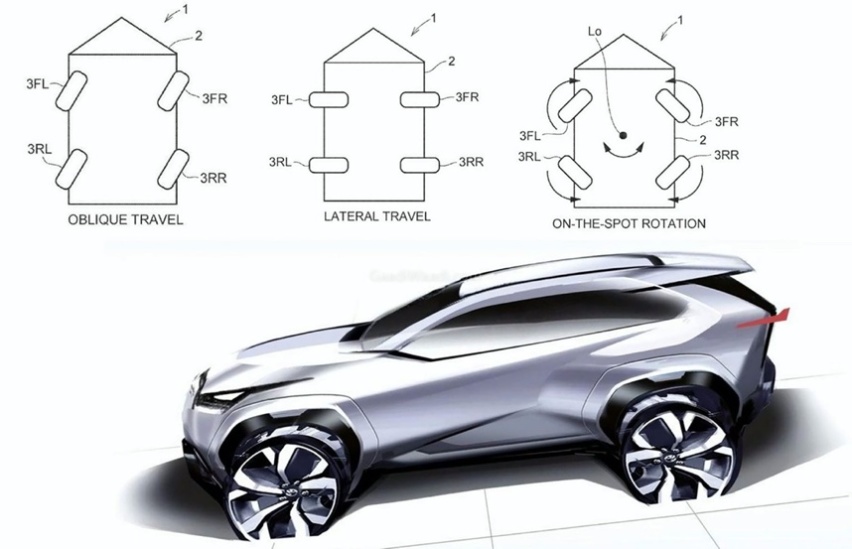
根据丰田的专利信息显示,这次申请四轮转向专利是通过在每个车轮上安装独立电机,使单个车轮最大转角可达90°,可以实现同相位转向和逆相位转向两种偏转规律。其采用的电机相比电控液压动力系统在控制性能、系统布置、节能等方面,也有着更好的表现。
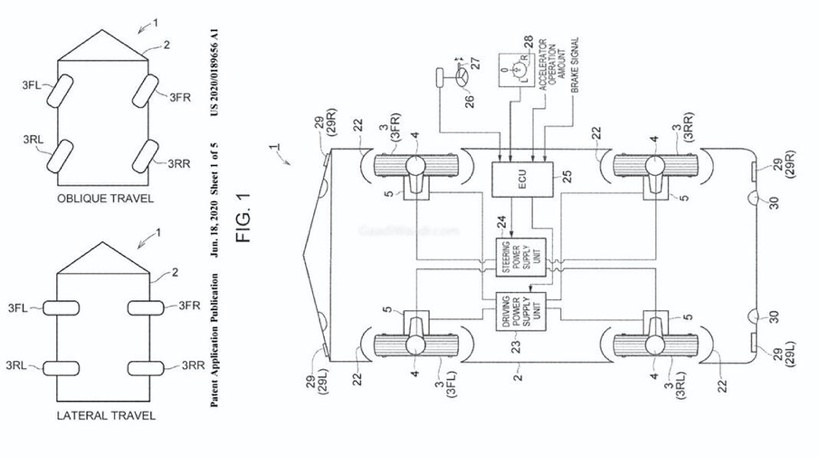
不同于传统四轮转向系统,丰田的专利不再受限于辅助提升低速灵活性与高速稳定性,而是实现更多灵活场景应用。该专利的车轮转角范围大幅提升,前后车轮均可实现90°偏转,也就是说可以进行原地掉头或平移驶入车位,在一些特殊路况和停车场景下,拥有更强的适用能力。另外,丰田的专利也支持四轮同角度偏转,进行斜向行驶。
为了配合这套四轮转向系统的特别功能,丰田还在专利中申请了新型的声光提示信号,通过特殊规律的灯光闪烁或图像信息,告诉其它交通参与者接下来的运动方向。
结语
四轮转向技术最难做的不是结构设计和电子系统,而是如何精准判断驾驶员意图。与传统四轮转向技术不同,丰田新型四轮转向技术不仅保留了优化车辆动态性能的能力,还可以为车辆提供更多行驶方式,解决了更多现实的需求。当然,这种方式依然存在相同的问题,四轮转向技术想要真正普及,还需等待高阶自动驾驶时代的到来。















