EC6轿不轿跑的无所谓,主要是想试试蔚来的NOP

“领航辅助”,从自动驾驶辅助迈向自动驾驶的路上,表面上看最具有跨越性意义的一步,尽管还叫辅助,但自从我们将“自动驾驶”定为目标开始,这个东西的出现才算让我们看到了目标实现的雏形。

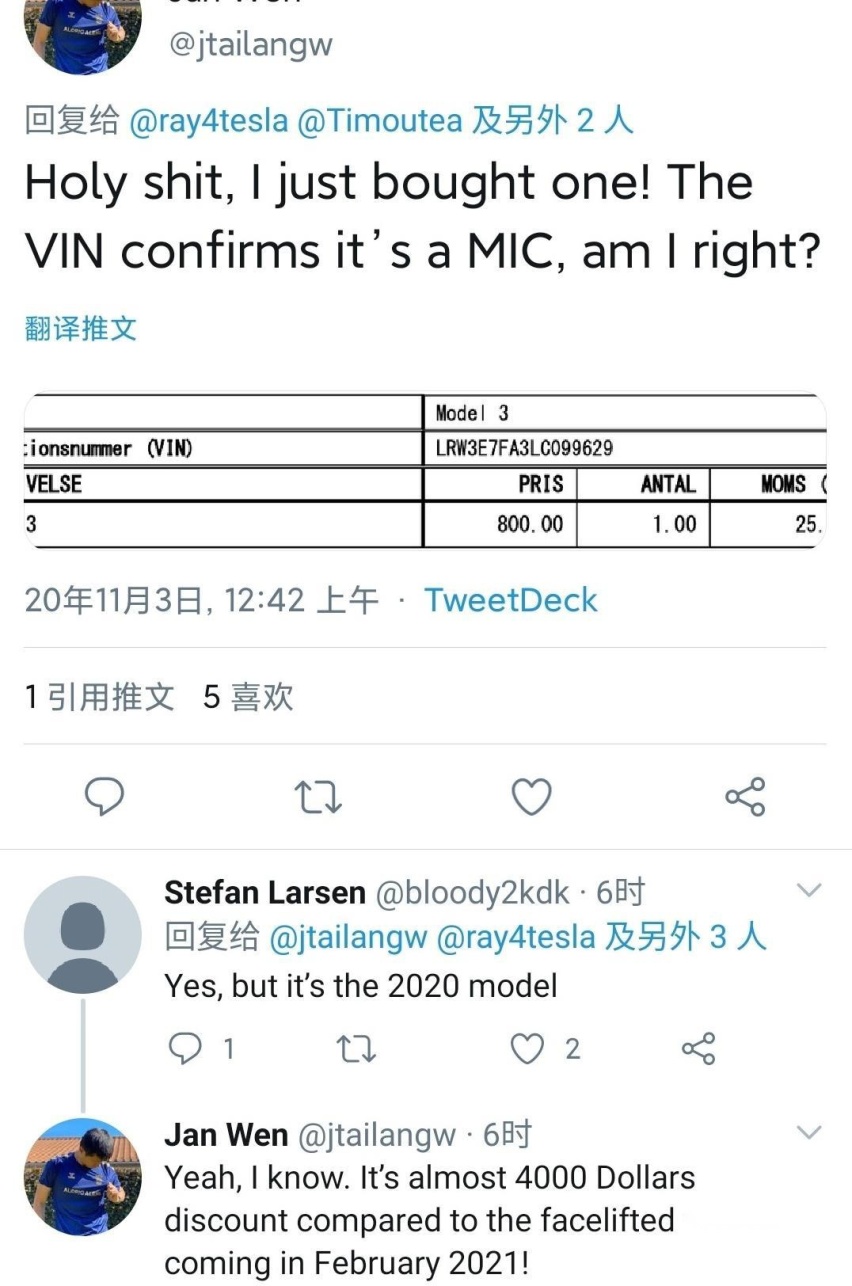
所谓的领航辅助,即在Pilot功能基础之上,支持车辆根据导航路径规划,在高精地图覆盖范围内的大部分高速公路及城市高架路等路段实现自动进出匝道和切换主干道,同时可根据道路限速和环境感知等信息自动调整车速、智能变换车道及超越慢车,从而实现指定路径下的按照导航路线自动辅助驾驶。

注意,这个功能实现有一个很重要的前提:在高精地图覆盖范围内。那么这个范围包括什么呢?包括大部分的高速公路、城市快速路、高架道路等,我们这次参加试驾的北京地区则是限定在五环及以外的环路和高速公路,原因是五环内的高精地图数据并不开放。
当然了,蔚来并不是唯一实现这个功能的汽车制造商,其实也不是第一个,第一个当然是那个万恶的特斯拉了。目前世界上共有3家推出了此项功能,分别是特斯拉、蔚来、小鹏,记住它们各自的名字:特斯拉NOA(Navigate on Autopilot),蔚来NOP(Navigate on Pilot),小鹏NGP(Navigation Guided Pilot)。
而当我们驾驶着EC6驶出五环之后,我当然迫不及待的开启了NOP试图与未来对话,当然我心里也明白,我最多不过是与蔚来对话而已,哈哈,但也令人无比好奇,甚至我都不知道该用什么样的标准来判断,我连自己的结论是宽松还是严苛都无从得知,这就太有趣了。

首先要承认,蔚来NOP的使用体验是从优点开始的,因为上手极其简单,简单到让我无比惊讶。车载导航中的路线设置好之后,方向盘左边的NOP功能键按一下,然后就完了,对,完了!虽然我一向认同便利性是一个产品的体验上最重要的加分项,但这也未免太简单了。

如果在没有高精地图覆盖的道路上按下功能键,车辆会进入常规的L2级自动驾驶,也就是自适应巡航+车道保持等一系列熟悉的功能,而当车辆进入高精地图覆盖范围内,车辆会自动开启领航辅助。

此时可以在仪表上看到虚拟车辆图标前方出现一个蓝色的道路图标,就代表着你已经进入领航模式,可以放松一下你的身体了,当然后半句是未来的场景。

除了操作便利之外,蔚来NOP另一个优点是关于变道的操作,车辆会根据周围道路和车流的情况选择合适的车道,比如当前方有慢车时,车辆会探测两侧车道是否符合变道条件,包括后方是否有快速来车、前方是否有车辆阻挡、以及是否是虚线等等,当具备变道条件时,系统会自动规划变道路线,自行开启转向灯并自行变道。
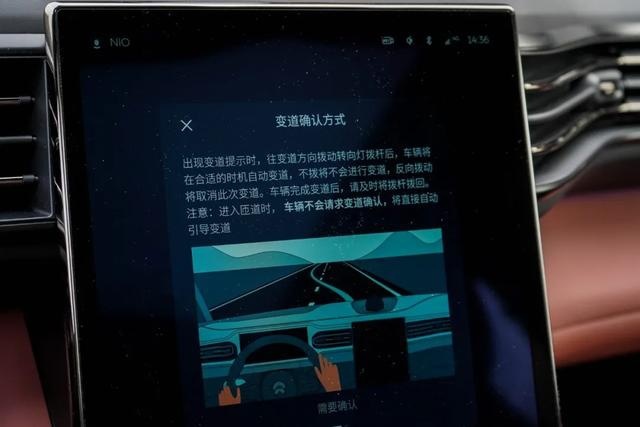
整个判断和执行的逻辑比较保守,比如在它已经判定可以变道之后,自动开启转向灯,但还要等待两三秒再开始变道,如果此时虚线突然变成实现或者后方突然出现快速接近的来车,那蔚来车辆会立即中止变道并回到原位继续跟车,直到下一次满足变道条件再次尝试。

但我也发现了几点情况,比如车辆自动变道之后,方向开始回正的点是要比我自己驾驶时的操作习惯稍晚一些的,所以在一开始体验的时候我每次都有点心惊胆战,多次成功之后才算适应了这个节奏,不过整个变道的过程非常顺滑流畅,并没有出现过突兀的制动或加速。

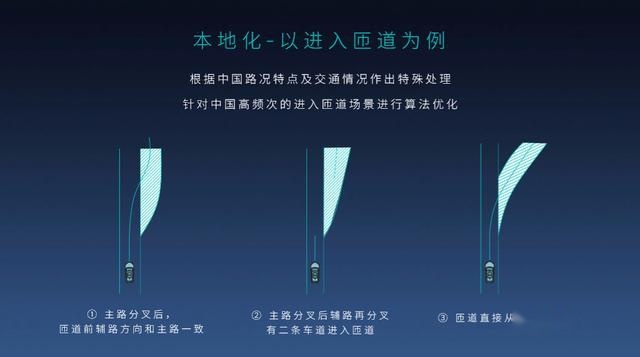
优点说完了,该说说缺点了,蔚来NOP系统在正常的巡航和变道超车工况中表现得非常遵规守纪,但进出匝道这一项还有待提升,首先是并入匝道的过程对方向的控制明显不如普通变道那么流畅,会出现零碎而不够平顺的调整;其次汇入新的主路时对车道线的识别率还不够高,偶尔会出现识别失败需要人工接管车辆的情况。

分析一下问题的原因,进入匝道的操作在后方来车较少时,偶有零碎的方向调整,应该是由于车道方向变化幅度和车速降低的幅度都比较大,尤其是当右侧的后方来车较多时,系统的控制策略无法达到真人驾驶的应变水平;而汇入主路时,则是由于匝道出口的类型过于繁多复杂,并且车道出现合并,所以出现识别失准情况倒也有迹可循。
总结一下,蔚来这套NOP系统在使用体验上展现出的优秀之处在于:使用极其方便,以及常规变道的流畅性和安全性都很出色。不足之处在于:进出匝道的识别和应变能力还有所欠缺,还需要大量的数据和经验来让它变得更加完善。

另外,北京的五环以内不开放高精地图,所以这项功能在北京的使用场景其实比较局限。还有需要注意的一点就是,NOP在没有高精地图覆盖的范围内就是我们常见的L2级自动驾驶,也就是说无论有没有高精地图,无论NOP有没有开启,我们要遵守的前提都包括:要双手握着方向盘。因为领航辅助依然还不是真正的自动驾驶。

当然,我的结论也有疏漏,比如在试驾当天的路段上我们并没有遭遇堵车等状况,路况和车流量等测试环境都比较理想,所以体验结果整体上应该是偏优的,不过我们也在筹划一期【铁秀】,专门测试一番蔚来的NOP,我们会准备一套比较全面的测试方案,看看它在各种情况下的表现如何。

老实说,作为一个习惯并且爱好驾驶的人,我平时并不依赖甚至说有些抗拒这类自动驾驶辅助功能,因为体验这个远远比我亲自驾驶要累多了,由于我对系统的不信任导致我强行压抑着接管车辆的冲动看着它自行解决时内心的惊惧,实在是很夸张,但每次成功之后的欣喜也十分高涨且真实,那就在此希望蔚来有未来,未来有蔚来吧。

本文作者为踢车帮 刘剑星