汽湃观察 | “实现L4级自动驾驶”,威马这次是吹牛么?
来源:汽湃
2021-02-02 17:48:14
 近来,伴随着威马新车型W6的正式量产下线,不少的媒体均直接在相关标题中大肆渲染“威马已经实现了L4级别自动驾驶的量产落地”;导致该事件在网络上引起巨大的关注与争议。
近来,伴随着威马新车型W6的正式量产下线,不少的媒体均直接在相关标题中大肆渲染“威马已经实现了L4级别自动驾驶的量产落地”;导致该事件在网络上引起巨大的关注与争议。 当然,有力挺威马支持国货的,自然也有抱有质疑声音怀疑其“放卫星”的;毕竟我们能够知道的是,威马在世界新能源车企中的排名其实并不靠前,历来也没有什么特别亮眼的技术储备。作为对比,目前全世界量产自动驾驶技术的领头羊车企特斯拉,目前在北美尚处于测试阶段的全自动驾驶FSD beta版本不过才介于L3和L4级自动驾驶之间的水平。但是,当我们深入细致的了解了这件事情的细枝末节后,发现这事儿其实远没有表面上看起来这么简单,虽然网络上争议的核心是“威马是否做到了L4级自动驾驶”,但是在威马官方的表述中,我们找到的原文却是这样的:“国内首款具备特定场景下云端智能无人驾驶能力的车型威马W6”。
当然,有力挺威马支持国货的,自然也有抱有质疑声音怀疑其“放卫星”的;毕竟我们能够知道的是,威马在世界新能源车企中的排名其实并不靠前,历来也没有什么特别亮眼的技术储备。作为对比,目前全世界量产自动驾驶技术的领头羊车企特斯拉,目前在北美尚处于测试阶段的全自动驾驶FSD beta版本不过才介于L3和L4级自动驾驶之间的水平。但是,当我们深入细致的了解了这件事情的细枝末节后,发现这事儿其实远没有表面上看起来这么简单,虽然网络上争议的核心是“威马是否做到了L4级自动驾驶”,但是在威马官方的表述中,我们找到的原文却是这样的:“国内首款具备特定场景下云端智能无人驾驶能力的车型威马W6”。 虽然大家都说的是“L4级:全部动作由车辆自动完成的自动驾驶技术”,但是几个字的差异其实却又不能不重视,除了上图威马官方微信公众号之外,在威马官方其它渠道的一系列宣传中,也非常注重准确性,包括“特定场景、限制条件”等词语多次出现,并且能够很明确的感知到,威马官方宣传的核心重点其实是“全部动作由车辆自动完成的自动泊车能力”属于L4级应用场景中的很小一部分,并非网友们和部分媒体理解的广义“开放道路上的常规L4级自动驾驶”。
虽然大家都说的是“L4级:全部动作由车辆自动完成的自动驾驶技术”,但是几个字的差异其实却又不能不重视,除了上图威马官方微信公众号之外,在威马官方其它渠道的一系列宣传中,也非常注重准确性,包括“特定场景、限制条件”等词语多次出现,并且能够很明确的感知到,威马官方宣传的核心重点其实是“全部动作由车辆自动完成的自动泊车能力”属于L4级应用场景中的很小一部分,并非网友们和部分媒体理解的广义“开放道路上的常规L4级自动驾驶”。 换句话说,威马宣传的W6车型自动驾驶,其实可以准确表述为“特定场景下、有限制条件的实现L4级自动泊车”。同时深挖之下,我们也会发现其新技术有许多不足之处,因为能看出其“特定场景、有条件”的限制因素确实太多,短期上还是“噱头大于实际意义”。如何做到L4级自动泊车?核心依靠“Cloud AVP技术”首先我们明确一点,威马W6确实是可以做到特定场景下有条件的L4级自动泊车,即:只需要人工的一个指令,甚至可以是远程指令,之后剩下的所有移动、找位置、泊车、驶出到达指定位置等动作均由车辆自动完成。
换句话说,威马宣传的W6车型自动驾驶,其实可以准确表述为“特定场景下、有限制条件的实现L4级自动泊车”。同时深挖之下,我们也会发现其新技术有许多不足之处,因为能看出其“特定场景、有条件”的限制因素确实太多,短期上还是“噱头大于实际意义”。如何做到L4级自动泊车?核心依靠“Cloud AVP技术”首先我们明确一点,威马W6确实是可以做到特定场景下有条件的L4级自动泊车,即:只需要人工的一个指令,甚至可以是远程指令,之后剩下的所有移动、找位置、泊车、驶出到达指定位置等动作均由车辆自动完成。 那么,威马W6又是如何做到的呢?在威马这里,这项功能被称为“云端智能无人泊车系统(Cloud AVP)”,是由百度和威马汽车合作开发的,其最核心的创新技术点在于将传统的自动驾驶数据处理由1变为了1+1,即本地车载算力再加云端。在具体的功能细节上,Cloud AVP又包含两种不同的落地场景:一个是类似商场或者写字楼的那种商业停车场;另一个是自己家或者公司那种可能拥有固定车位的停车场;前者被称为PAVP,后者被称为HAVP,并且后者能实现的限制条件要小于前者。
那么,威马W6又是如何做到的呢?在威马这里,这项功能被称为“云端智能无人泊车系统(Cloud AVP)”,是由百度和威马汽车合作开发的,其最核心的创新技术点在于将传统的自动驾驶数据处理由1变为了1+1,即本地车载算力再加云端。在具体的功能细节上,Cloud AVP又包含两种不同的落地场景:一个是类似商场或者写字楼的那种商业停车场;另一个是自己家或者公司那种可能拥有固定车位的停车场;前者被称为PAVP,后者被称为HAVP,并且后者能实现的限制条件要小于前者。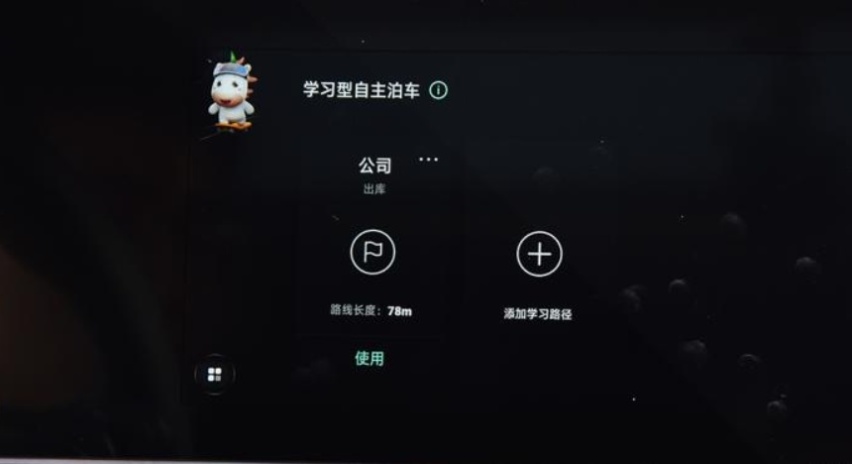 关于HAVP,目前威马W6可以实现被召唤出车位(出库)、自主找车位停车(入库)两个动作,并且支持的单程最长距离是达到了100米,也就是说如果您家的固定车位离电梯口路线长度不超过100米的话,那么完全可以做到走到电梯口召唤车辆来接您出发,回家开到电梯口后您下车、车辆再自主行驶到固定车位自动泊车的L4级自动驾驶画面。
关于HAVP,目前威马W6可以实现被召唤出车位(出库)、自主找车位停车(入库)两个动作,并且支持的单程最长距离是达到了100米,也就是说如果您家的固定车位离电梯口路线长度不超过100米的话,那么完全可以做到走到电梯口召唤车辆来接您出发,回家开到电梯口后您下车、车辆再自主行驶到固定车位自动泊车的L4级自动驾驶画面。 不过,为了实现上述画面,在首次使用HAVP时,车辆需要一个学习过程。即用户需要手动驾车从车位驶出到上客点、从下客点到车位。这个所谓的学习过程,你可以理解为“人带车学习一遍路线”,也就是车辆记录、上传用户的行驶路线数据至云端;当车辆真正进行自动泊车时,车辆会以云端数据复刻用户此前的行驶路线,从而完成自动泊车的入库、出库动作。此外,除了会使用上传云端的大量场景数据与计算能力之外,在HAVP工作时,威马W6自带的7个摄像头、5个毫米波雷达以及12个超声波雷达加上自身的算力处理能力也都会开启工作,用以保持安全冗余。而限制条件更多的PAVP与上文HAVP又有不同。在商场或写字楼等地下车库中,因为场景更为复杂、车位也并不固定,同时来往的交通参与者更多,这就要求PAVP基于车库的高精地图来实现自动寻找车位、自动上下楼层等功能。而如果车库没有高精地图数据,那就无法实现L4级的自动泊车。
不过,为了实现上述画面,在首次使用HAVP时,车辆需要一个学习过程。即用户需要手动驾车从车位驶出到上客点、从下客点到车位。这个所谓的学习过程,你可以理解为“人带车学习一遍路线”,也就是车辆记录、上传用户的行驶路线数据至云端;当车辆真正进行自动泊车时,车辆会以云端数据复刻用户此前的行驶路线,从而完成自动泊车的入库、出库动作。此外,除了会使用上传云端的大量场景数据与计算能力之外,在HAVP工作时,威马W6自带的7个摄像头、5个毫米波雷达以及12个超声波雷达加上自身的算力处理能力也都会开启工作,用以保持安全冗余。而限制条件更多的PAVP与上文HAVP又有不同。在商场或写字楼等地下车库中,因为场景更为复杂、车位也并不固定,同时来往的交通参与者更多,这就要求PAVP基于车库的高精地图来实现自动寻找车位、自动上下楼层等功能。而如果车库没有高精地图数据,那就无法实现L4级的自动泊车。 不过对于绘制高精地图的问题,目前威马汽车只是表示他们和百度会尽快完成各地库的覆盖,同时在用户的日常行车中,威马汽车也会收集相关数据,对高精地图进行优化。到了这一步,您大概也就了解所谓的“特定场景、有条件的L4级自动泊车”这几个字是什么意思了。我们可以试想一下:每座城市有多少个商场、写字楼?中国又有多少个城市?如果再排除信号不好、无法满足云端数据上传下载的那一部分车库之后;至少以笔者目前能想象到的画面,PAVP功能几乎就是一个噱头,甚至很多车主可能连最基础的HAVP限制条件都达不到,因为不是每个人都有标准的固定车位。虽噱头大于实际意义,但“Cloud”或提供技术发展新路径不过,虽然我们说现阶段这个L4级自动泊车Cloud AVP是“噱头大于实际意义”,但是以技术论技术,威马和百度阿波罗在W6车型身上首创的这套新玩意儿又确实是很有创新性。甚至从某种角度来说,可以认为它是为目前的全自动驾驶技术提供了一种路径发展可能,因为它确实做到了特定场景的L4级,但同时它既没有纯视觉算法,也没有激光雷达。它的独特性,就体现在云端“Cloud”上。
不过对于绘制高精地图的问题,目前威马汽车只是表示他们和百度会尽快完成各地库的覆盖,同时在用户的日常行车中,威马汽车也会收集相关数据,对高精地图进行优化。到了这一步,您大概也就了解所谓的“特定场景、有条件的L4级自动泊车”这几个字是什么意思了。我们可以试想一下:每座城市有多少个商场、写字楼?中国又有多少个城市?如果再排除信号不好、无法满足云端数据上传下载的那一部分车库之后;至少以笔者目前能想象到的画面,PAVP功能几乎就是一个噱头,甚至很多车主可能连最基础的HAVP限制条件都达不到,因为不是每个人都有标准的固定车位。虽噱头大于实际意义,但“Cloud”或提供技术发展新路径不过,虽然我们说现阶段这个L4级自动泊车Cloud AVP是“噱头大于实际意义”,但是以技术论技术,威马和百度阿波罗在W6车型身上首创的这套新玩意儿又确实是很有创新性。甚至从某种角度来说,可以认为它是为目前的全自动驾驶技术提供了一种路径发展可能,因为它确实做到了特定场景的L4级,但同时它既没有纯视觉算法,也没有激光雷达。它的独特性,就体现在云端“Cloud”上。 这个Cloud,目前作用更多的是存储其L4级自动泊车的场景与路径数据,并提供一定的算力支持,但未来我们完全可以猜想,在更多复合L4级场景下,云端可能会承担更多的算力任务,进而提升自动驾驶能力并显著降低整车成本。这个想法,是有足够证据支撑的。我们能看到的是,随着目前自动驾驶级别的升级,各大厂商的车载算力平台数据处理能力都在同步升级,比如目前特斯拉FSD的算力已经做到了144TOPS,蔚来尚未正式交付的ADAM平台更是做到了目前业界最高的1016TOPS。但是,面对未来会全面普及的复合场景L4级自动驾驶,这个算力依然不足,并且因为车载算力平台会受制于功耗与尺寸问题,算力不可能无限大幅的提升。至于不会无限提升的原因,您去看看那些水电站旁边的“比特币矿场”就知道了,在巨大算力的背后,需要的电能和散热能力也是空前的。
这个Cloud,目前作用更多的是存储其L4级自动泊车的场景与路径数据,并提供一定的算力支持,但未来我们完全可以猜想,在更多复合L4级场景下,云端可能会承担更多的算力任务,进而提升自动驾驶能力并显著降低整车成本。这个想法,是有足够证据支撑的。我们能看到的是,随着目前自动驾驶级别的升级,各大厂商的车载算力平台数据处理能力都在同步升级,比如目前特斯拉FSD的算力已经做到了144TOPS,蔚来尚未正式交付的ADAM平台更是做到了目前业界最高的1016TOPS。但是,面对未来会全面普及的复合场景L4级自动驾驶,这个算力依然不足,并且因为车载算力平台会受制于功耗与尺寸问题,算力不可能无限大幅的提升。至于不会无限提升的原因,您去看看那些水电站旁边的“比特币矿场”就知道了,在巨大算力的背后,需要的电能和散热能力也是空前的。 特斯拉FSD芯片但是,如果按照现有威马和百度“云端”的模式来执行复合场景L4级自动驾驶,那么车载算力的要求就低的多了,因为大可将数据交由云端的超级计算机处理,配合5G网络低时延特性,一切都足以,还能避免硬件堆砌导致的成本过高问题。而如果威马真的能做到这一步,未来会很可期。脱离技术,从这一事件再看造车新势力的局这一次威马的宣传,无疑是成功的,因为这项“L4级自动泊车技术”的关注度已经超越了其新车W6;这也就直接赋予了威马汽车这一品牌以极高的智能化标签。
特斯拉FSD芯片但是,如果按照现有威马和百度“云端”的模式来执行复合场景L4级自动驾驶,那么车载算力的要求就低的多了,因为大可将数据交由云端的超级计算机处理,配合5G网络低时延特性,一切都足以,还能避免硬件堆砌导致的成本过高问题。而如果威马真的能做到这一步,未来会很可期。脱离技术,从这一事件再看造车新势力的局这一次威马的宣传,无疑是成功的,因为这项“L4级自动泊车技术”的关注度已经超越了其新车W6;这也就直接赋予了威马汽车这一品牌以极高的智能化标签。 当然,如果我们换个角度思考,站在威马或者站在投资人的角度来看待这个问题;其实也就能够发现核心的逻辑所在,因为大家都希望这个标签是“智能化”而不是“电动车”,这就是曾经的威马EX5(参数|询价)/EX6和这一台威马W6之间最本质的差异,也是曾经的“造车新势力威马”和“智能化车企威马”的本质差异。直观看到的是,在2020年和已经开局一个月的2021年,资本市场上所有的“智能化车企”股价都在突飞猛进,特斯拉大家都知道就不说了,即便是其后的蔚来、小鹏等等也表现不俗,甚至基于传统燃油动力的长城汽车,也在全新的智能化技术大潮下,股价从2020年6月份的不足8元,一路到年底最高超过51元。而威马需要的正是这个,他们需要资本为他们源源不断的输血,才能够在竞争异常惨烈的当下活下来;也只有活下来的车企,才能够在未来美好的智能化时代里有所作为。
当然,如果我们换个角度思考,站在威马或者站在投资人的角度来看待这个问题;其实也就能够发现核心的逻辑所在,因为大家都希望这个标签是“智能化”而不是“电动车”,这就是曾经的威马EX5(参数|询价)/EX6和这一台威马W6之间最本质的差异,也是曾经的“造车新势力威马”和“智能化车企威马”的本质差异。直观看到的是,在2020年和已经开局一个月的2021年,资本市场上所有的“智能化车企”股价都在突飞猛进,特斯拉大家都知道就不说了,即便是其后的蔚来、小鹏等等也表现不俗,甚至基于传统燃油动力的长城汽车,也在全新的智能化技术大潮下,股价从2020年6月份的不足8元,一路到年底最高超过51元。而威马需要的正是这个,他们需要资本为他们源源不断的输血,才能够在竞争异常惨烈的当下活下来;也只有活下来的车企,才能够在未来美好的智能化时代里有所作为。 数据方面,在上海证监局近日发布的威马上市辅导总结报告中显示,2017年、2018年、2019年以及2020年1至9月,威马汽车实现归母净利润分别为:-16.96亿元、-24.53亿元、-36.08亿元以及-36.49亿元。在不足四年的时间里,累计亏损了超过114亿元;而同期他们的总营收还不足42亿。显然,比起“电动新车型”这个老话题,只有顺应趋势的“智能化、L4级自动驾驶”这个新标签,才能够让威马更好的活下去。不过,关于“威马能在这个智能化的时代中走多远?”的问题,可能目前还没有人能够给出准确答案,也没有人能够拍着胸口肯定的说“未来的市场中,一定会有威马的一席之地”。因为包括威马的股东方百度、同时也是这项L4级自动泊车技术的供应方,如今也已经自立门户:2021年的1月11日,百度与吉利正式组建百度电动汽车公司,双方将基于吉利全新的电动车架构“浩瀚SEA”打造全新的智能化电动品牌车型。
数据方面,在上海证监局近日发布的威马上市辅导总结报告中显示,2017年、2018年、2019年以及2020年1至9月,威马汽车实现归母净利润分别为:-16.96亿元、-24.53亿元、-36.08亿元以及-36.49亿元。在不足四年的时间里,累计亏损了超过114亿元;而同期他们的总营收还不足42亿。显然,比起“电动新车型”这个老话题,只有顺应趋势的“智能化、L4级自动驾驶”这个新标签,才能够让威马更好的活下去。不过,关于“威马能在这个智能化的时代中走多远?”的问题,可能目前还没有人能够给出准确答案,也没有人能够拍着胸口肯定的说“未来的市场中,一定会有威马的一席之地”。因为包括威马的股东方百度、同时也是这项L4级自动泊车技术的供应方,如今也已经自立门户:2021年的1月11日,百度与吉利正式组建百度电动汽车公司,双方将基于吉利全新的电动车架构“浩瀚SEA”打造全新的智能化电动品牌车型。 最后总结虽然这一次威马的L4级宣传在网络上确实是引发了热议,但是这一次官方的表述其实还是较为严谨的,其“特定场景、有条件的L4”真不能算放卫星,因为是确确实实能够做到的。不过在另一个层面上,大家也不必就此而为威马欢呼,因为一系列限制,导致目前该技术“噱头大于实际意义”,其创新性的一系列新技术、新理论,未来究竟能到达何种高度,一切都还是未知数,目前没有人知道。并且相比表面风光的“L4级技术量产”,在深层次上威马所面对的复杂局面,其实才是更精彩,更值得关注的地方。
最后总结虽然这一次威马的L4级宣传在网络上确实是引发了热议,但是这一次官方的表述其实还是较为严谨的,其“特定场景、有条件的L4”真不能算放卫星,因为是确确实实能够做到的。不过在另一个层面上,大家也不必就此而为威马欢呼,因为一系列限制,导致目前该技术“噱头大于实际意义”,其创新性的一系列新技术、新理论,未来究竟能到达何种高度,一切都还是未知数,目前没有人知道。并且相比表面风光的“L4级技术量产”,在深层次上威马所面对的复杂局面,其实才是更精彩,更值得关注的地方。