支持多条泊车路线 体验威马智能云端无人泊车系统
在 2020 年百度 Apollo 生态大会上,威马汽车旗下第三款车型首次公开亮相,亮相之初新出行抢先为大家带来了新车的静态体验。

从当初的静态体验以及各方获得的信息来看,作为威马汽车的第三款产品,新车是由威马汽车深度联手百度 Apollo 平台开发打造,所以除了常规的辅助驾驶功能外,新车还有一个最大的亮点,那就是“云端智能无人泊车”系统。
所以,“云端智能无人泊车”系统是什么?他能带来什么?或者说能实现哪些功能?这一次我们来到威马汽车位于黄冈的智能工厂实际体验了一番。
一、什么是云端智能无人泊车系统?有哪些功能?
云端智能无人泊车系统,也就是 Cloud AVP,它依靠全车部署的 22 个传感器,包含 5 个 77GHz 毫米波雷达、6 个摄像头及 12 个超声波雷达来工作,并不是单纯的依靠摄像头工作。

搭载“云端智能无人泊车”系统的威马新车可通过中控大屏操作让 Apollo 系统快速记忆与识别道路并上传云端,当云端完成计算并下发,即可完成在无人干预情况下的自动驾驶、躲避障碍物、车位智能搜索和自主泊入、泊出等功能。

另外,官方表示还可以实现停车场景下的 L4 级别无人驾驶功能——用户只需要把车停放在停车场的入口,车辆会在无人状态下自动驶入停车场内,寻找并泊入可停靠的车位。不过,这一次在威马智能工厂我们只体验了地面上的无人泊出车位和无人泊入车位功能。
二、如何使用云端智能无人泊车系统?
使用云端智能无人泊车系统可通过蓝牙或有网络的环境下在中控大屏找到“智能泊车”功能,点击“智能泊车”功能后会进入到“学习型自主泊车”功能界面,之后根据提示“添加学习路径”,支持“出库”和“入库”两种方案。

首次使用需要添加学习路径
这个添加学习路径其实就是“车主先自行驾驶一次,车辆记录你的行驶路径,包括车主设置的车辆起点和终点”。在车主驾驶完之后确定了起点和终点以及行驶路线后,车辆会快速记忆与识别道路并上传云端,之后云端完成计算并下发,云端下放后,车辆会根据你的行驶路线在同一路段就可以实现“无人泊车”。

从当天的体验来看,“云端智能无人泊车”在车内使用时主驾驶位置要有驾驶员,且驾驶员不得离车才可以实现“无人泊车”。当然,通过手机 APP 远程召唤操作是不需要车内有人的。
添加学习路径后有两种选择,一种是停车“入库”、一种是开车“出库”。
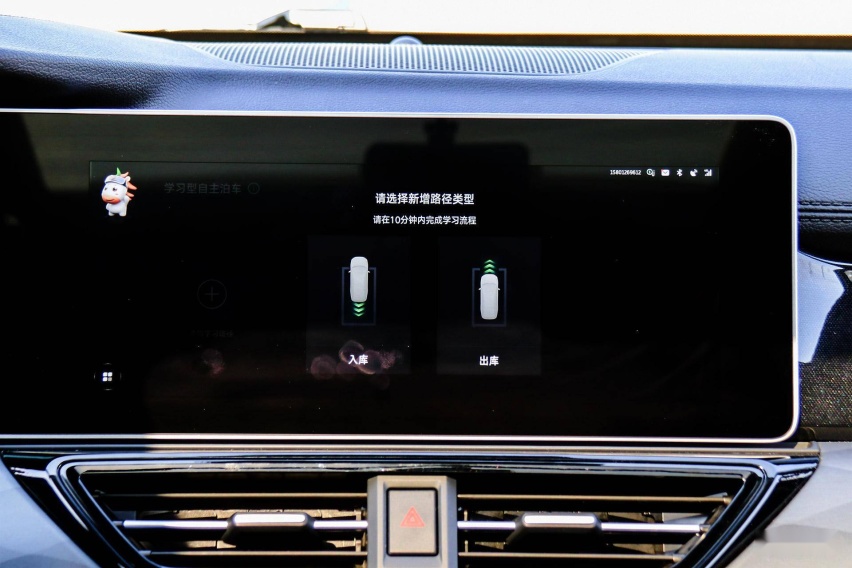
支持出库和入库两种 但都需要清晰停车线
在选择使用“出库或入库”时,需要在;
保证附近有标志性建筑;
保证车外环境光线充足,请勿夜间学习;
保证车内外摄像头没有遮挡;
请与前车保持距离。

使用注意事项
设置出库或入库路线都需要将车辆停放在有完整停车线的停车位。之后,我们先体验的是“出库”路线,在选择出库选项后,我们点击中控大屏的左下角的“设为起点”,“设为起点”后,车主自己来驾驶车辆去往车主需要到达的终点。

今天体验的试装车的终点距离和起点的距离是在 100 米以内,也就是起点和终点不得超过 100 米,如果超过就无法实现无人泊车。未来上市的时候这个距离会先控制在 50 米,之后在升级到 100 米,当搭载 5G 车型上市后,起点和终点的距离会增长。同时,车主在驾驶车辆学习路径时车速也不得超过 15km/h。

车主驾驶车辆路线学习时速要低于 15km/h
最后,车主驾驶车辆到达你想要的停车点后(这个点不需要清晰车道线),你需要停车并点击中控大屏左下角的“设为终点”。这个时候一个完整的起点、终点会被车辆记录并上传云端,上传云端时你可以根据这个路线来设置对应的名称,例如终点是家那就设置为家,是公司就可以设置为公司。

学习路线后可设置车位名称
在路线设为终点后,车辆中控大屏会有一个记录路径并上传的过程,今天实际体验车辆保存路径上传云端大概需要 2-3 分钟左右,并非大屏上显示的 10 分钟。当然了,目前体验的这一版非最终量产版状态。

真实体验记录用时大约 2-3 分钟
当根据车辆提示完成后,中控大屏“学习型自主泊车“功能界面会出现车主刚刚行驶记录的路径。这一路径就是你刚刚自行驾驶车辆的设置后的起点和终点。

路线学习成功 在起点出库即可使用
下一次从同样的起点到终点就可以直接点击“使用”。使用后,你的车辆就可以实现车辆的自动泊出,并到达指定的终点。
当然,这是从车库泊出的情景。如果你想要泊入车库同样是支持的,只需在学习型自主泊车“功能界面点击“继续点击“添加学习路径”,最多可添加 5 个路线的记忆。

最多可添加五个路径
另外,相较于自动泊出的功能来说,自动泊入则支持“固定车位”和“非固定车位”两种,其中固定车位就是仅支持单一车位的泊入。而非固定车位则可以自主选择最近的一个车位。

从今天的室外体验来看,车辆的自动泊出和自动泊入在准确度方面是没问题,只是泊车的最高时速会被控制在 8km/h 左右,最低出现过 2km/h 左右的速度,这样的做法主要是为了考虑安全。但是这样的速度如果日常在单车道使用的话可能会造成后车拥堵。

最快 8km/h
另外,车辆的自动泊出和自动泊入循迹性很好,在我们学习路径时故意“画龙行驶”后,在使用自动泊车也同样会画龙行驶,并且行驶过程中为了保证安全车辆会自行打开双闪以及转向灯,遇到行人也会自主刹停。
三、支持手机远程召唤功能
当然,在车辆学习了车主的驾驶路径后,车主还可以通过手机上的威马汽车 APP 来远程遥控召唤车辆。
手机打开威马汽车 APP 之后,功能菜单会出现“智能泊车”功能,点击“智能泊车”之后会进入智能泊车功能自检,自检后会进入到路线选择界面,这些路线的存在都是车主之前的驾驶学习路径的存储,之后根据车主的所在位置来选择不同的召唤终点。

威马汽车 APP 点击智能泊车

车辆自检

车主储存的路线
也就是说,如果下雨天你的车辆停在公司门前的停车场,这个时候你的手机里又有你存储的“门前停车场到公司门前”这个路径,那你就可以通过手机选取“门前停车场到公司门前”的路径来实现车辆到你面前。
不过,为了保证安全在使用手机召唤的时候需要手指不能离开手机,离开手机就会自动停车。同时,现阶段的手机遥控召唤仅支持人眼可见车辆时才能实现召唤。
最后,工作人员表示:“后续云端会收集不同车主的停车路线信息以及停车场信息,收集更多的停车信息后,云端会下放路线以及不同停车场的环境,把这些信息分享给其他车主使用,最终达到无人泊车。”
四、车型回顾 2021 年 3 月正式亮相
在之前,我们已经对威马新车进行了实拍。外观方面,新车整体设计与造型继承了威马家族化的设计语言,整体尺寸介于 EX5 与 EX6 之间。新车或将在 2021 年 3 月份正式亮相。

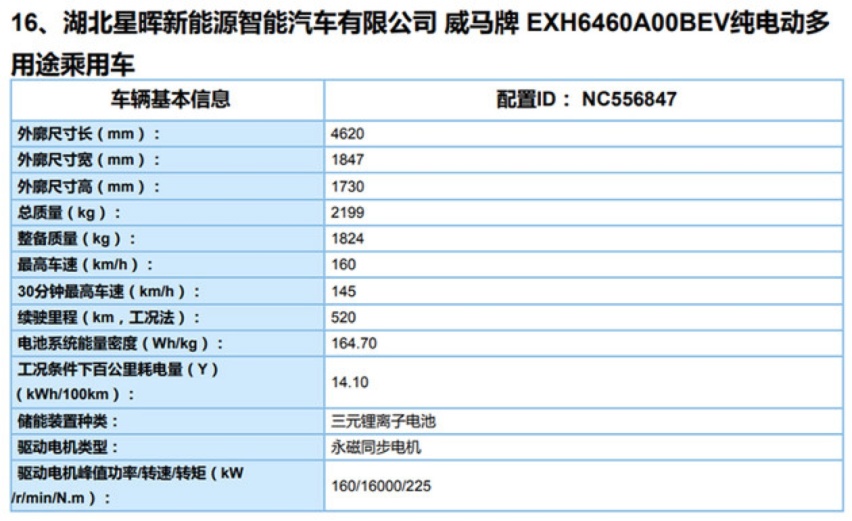
来到侧面,实拍车车顶顶采用了悬浮式设计,看起来更加运动。车身尺寸方面,根据申报信息,新车长宽高分别为 4620 / 1847 / 1730 mm,轴距为 2715 mm。


隐藏式门把手

快充口被放置在右前翼子板

慢充口被放置在左后方

内饰方面,目前官方还未正式公布内饰官图,而我们今天体验的车型工作人员也表示那并非最终量产版内饰。不过,据了解新车量产版内饰会在 2021 年 3 月左右正式发布,大家可以期待一下。

动力方面,根据此前的申报信息来看,该车电池采用的是来自湖北星晖新能源智能汽车有限公司生产的三元锂离子电池,电池容量为 65kWh,续航里程为 520km。
总结:作为威马第三款车型,新车在延续了威马家族化设计的同时在智能化做出了一些改变。相较于之前的 EX5 和 EX6 来说,威马的第三款车型也开始更加强调其智能化的身份。与百度深度合作,合力拓展 Apollo 生态也看出威马在智能化方面的决心。
不过,从今天的云端智能无人泊车表现来看,整个云端智能无人泊车表现成功率很高,但部分细节依然需要完善。不过,今天体验到的并非是最终版,我们也期待量产后的最终具体表现。另外,我们也期待接下来的“地库无人泊车”功能上线。














