科技测测看丨绝不辜负你的期待,体验小鹏NGP beta版
去年广州车展前,车云菌体验了小鹏NGP的工程版。虽然有瑕疵,但这个体验不错、功能有亮点的“样品”,拉满了我们对成品的期待值。想看它与特斯拉NOA、蔚来NOP的同台竞技,也憧憬着作为全球第三个高度自动化驾驶辅助系统的NGP,上演后来居上的好戏。

这不NGP beta版来了。从去年11月到今年1月,不到2个月的时间里,小鹏NGP团队完成了91次小版本迭代、12次大版本升级,加上百万级里程的道路测试,才有了这次的beta版。车云菌还了解到,NGP正式版将在春节前后推送给用户,计划今年一季度从广州开到北京的长途之旅,用的也是NGP正式版。看来beta版不仅要打磨细节,还要保证没有新的“致命伤”,剩下的时间不多了。
简单回顾工程版,带着问题往下看
小鹏P7(参数|询价)的硬件组成、NGP可实现的功能、针对国内路况做的优化等,车云菌在之前的文章里说过了,这次不再赘述。有兴趣的朋友可以回看《科技测测看丨上战场前的练兵,小鹏NGP工程版是怎样的体验?》,这篇主要写beta版的提升与体验感受。在此之前先来简单回顾一下工程版的问题和立下的flag:
1、相邻车道有大车时,工程版会让车辆保持在前车斜后,不会主动超车。
2、有车并入自己的车道,会遇到减速到接近刹停且与前车间距过大的情况。
3、自动设定最高时速后,遇到设定时速与真实限速数据不一致的情况,无法手动调节。
4、之前工程师表示,会提供偏激进和偏佛系两种变道风格,自定义选项会出现在beta版上吗?
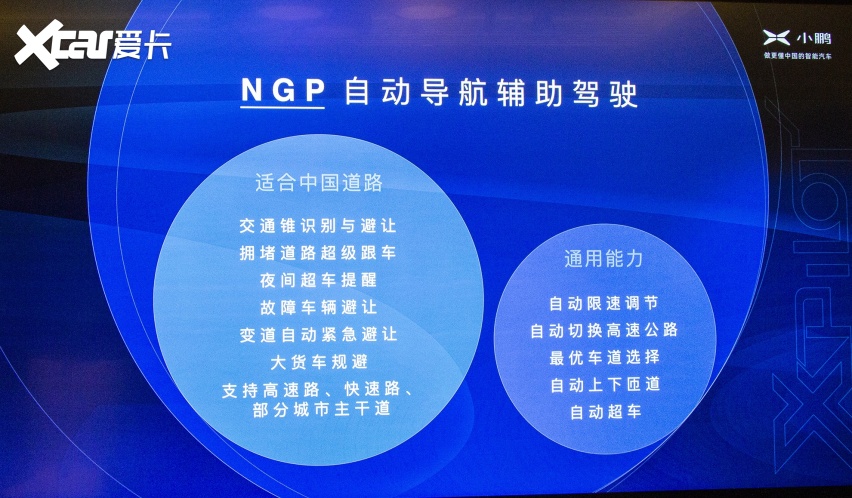
当然,相比工程版的内测属性,beta都是更成熟、更接近量产的版本。除了以上这四点外,车云菌还会额外关注系统稳定性表现等细节。另外,这项功能的全称从“NGP高速自主导航驾驶”变成了“NGP自动导航辅助驾驶”。简称还是NGP,但强调了“辅助”,以免让用户理解成“无人驾驶”。
预判技能get,还差最终打磨
先聊上次没做好的部分。这段时间小鹏工程师主要优化了算法,以及根据传感器信息进行的周围车辆动作预判上。现在遇到稳定、正常的大车时,NGP不是一直躲在斜后了,加速超车没犹豫。

要是大车压线或行驶轨迹向车道一侧偏的话,NGP会边监测并预判大车姿态,边缓慢加速超车。跟上课时趁老师不注意吃东西差不多,细嚼慢咽尽量别出声,老师一回头嘴就不能动了。如果这时大车有画龙迹象,NGP会直接刹车保证自身安全。
除了超车逻辑比工程版放的开外,社会车辆并入自己的车道时,这次的NGP只会小幅减速,并把前后车距控制在一个车长左右。制动力比之前碰到相似情况时的柔和了不少,车内乘员没觉得“慌”。此外,新版本还解锁了手动调节巡航时速功能。发现自动设定的巡航时速低于限速,能用方向盘按键自己调了。当然,无论自动还是手动,NGP可设定的最高车速都只到120km/h。

有些遗憾,工程师考虑到对激进和佛系的定义会因人而异,提供自定义变道风格的想法被pass了。这次的变道风格是前两种的综合体,并线瞬间的逻辑参考了偏佛系的,线性增加的横向加速度不会吓你一跳。之后的动作借鉴了偏激进的风格,提升了并线效率。能体会到变道过程变短了,不过舒适性跟上次没差别,工程版并入目标车道后总要小幅反打方向盘的小动作也没有了。好消息是,未来包括变道风格等自定义功能,将与出行场景结合,用类似“单人模式、多人模式”这种选项回归NGP。

工程版上体验不够好的地方,beta版都进行了立竿见影的优化。同时这次接入了驾驶员脱手监测模块,交通锥识别功能也有了。更完整的系统、跟上次不同的路况,beta版NGP也有不少新体验。举个例子,无论前视摄像头看到交通锥还是路边圆筒形的水马,系统都能给出“小心施工”的提示,并显示锥桶等障碍物的占道情况。如果障碍物在当前车道内,系统会提示需要驾驶员接管车辆。
匝道行驶NGP会把车速限制在60km/h以内,在车流较密的路段没毛病,可在上图这样车流稀疏的匝道上,这个速度很容易被超车,增加了系统预测周围路况的难度和危险性。希望小鹏的工程师能在正式版上提升一下匝道限速。

按照工程师的设定,在人工介入时NGP会退出工作。而用来监测是否有人工介入、你有没有脱手的,是方向盘扭矩传感器。虽然看到系统脱手提示后需要轻晃方向盘,但直线行驶和进出匝道时,车云菌没遇到系统误判导致退出的情况,也没发生系统无故退出的尴尬景象。对外力介入的判断和系统整体稳定性都不错。
不过遇到盘桥匝道等急弯,会因驾驶员和系统动作不同步发生误判,进而系统退出。这块小鹏程师表示下一步的优化会两步走,一来在变道、过弯时降低脱手监测的工作频率,二来未来启用方向盘前面的摄像头后,能用面部识别信息辅佐系统工作。
 上图:NGP 工程版;下图:NGP beta版
上图:NGP 工程版;下图:NGP beta版
在工程版让人眼前一亮的底子上,beta版优化了之前不够完善的地方,也带来了道路预判、交通锥识别等新能力。虽然细节还需打磨,但beta版完成了从瑕不掩瑜到不够完美的转变。运行稳定、让你安心还有高智商,有实力直接上车的beta版,给我们对正式版的期待添了柴。
除了更好的体验外,驶入NGP可用路段后,中控屏图标从带文字的矩形变成了更抽象的圆形。至于切换NGP UI和导航界面的圆形图标,会不会变成能随意拖动的悬浮设计?这些也是NGP正式版值得期待的地方。
没有悬念的突击考试
虽然小鹏NGP还没出师,但不免让人对它战力如何产生浓厚兴趣。不妨找个对手在相同路段上PK一下,比如装备NOA的特斯拉Model 3(参数|询价)?
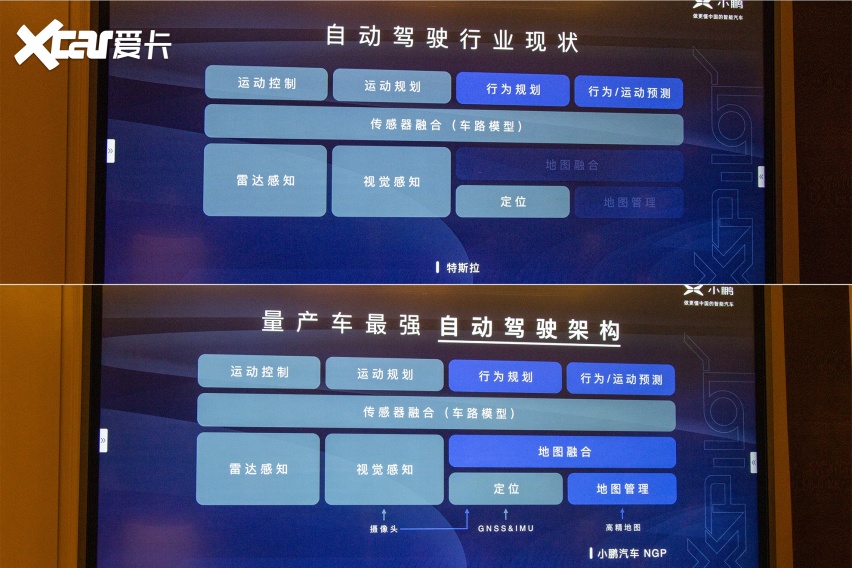
说是PK,可结果没悬念。从上图就能看出,特斯拉NOA相比小鹏NGP,少了高精地图和高精定位,能应对的场景很有限。
一来,驶入隧道前中控屏上会提示驾驶员NOA即将推出,这种定位和车联网信号都会受影响的场景,特斯拉应付不来。小鹏除了两个“高精”外,还有惯性导航。车在哪、该怎么走,NGP心里都清楚。
二来,包含弯道曲率等信息的高精地图,数据量与导航地图不在一个量级上,依靠它和摄像头的NOA,在较长的匝道、急弯里,有概率突然且频繁的退出,比自己开更揪心。

除了受限于软/硬件外,NOA的逻辑也不够聪明。驶入高速主路并打开NOA后,需要驾驶员手动调整巡航时速,不像NGP能根据地图信息自动设置为当前的最高限速。而接近高速出口即将驶入匝道的过程中,特斯拉自动向右并线、减速并成功驶入匝道的概率很低。唯一成功的一次,还被导航带跑偏了。从车机上看,路线是从当前高速驶出,在公路上调头再从另一个入口回到原来的高速上。这个迷之逻辑车云菌没能理解。
多数情况下,就算离出口仅剩300米时,特斯拉依旧会保持高速行驶,没有并线或减速动作。不想错过出口的话,你只能关闭NOA自己开。类似场景下,小鹏NGP不仅能依次向右并线,还会梯次减速到60km/h,直到驶入匝道,这个是工程版就已经解锁的技能。

不仅功能体验,人机交互也是特斯拉不如小鹏的地方。不知因何而起的“嘟嘟”声,搭配放在屏幕左下、容易被右臂挡住的文字提示,“它要干什么”是你在特斯拉上经常思考还想不明白的问题,这份未知也增加了NOA给人的不安感。相比之下,并线、即将进匝道、前方施工等场景,小鹏都能提供画面+语音双重提示。甚至在需要你接管车辆时,小鹏还会加上勒紧安全带的第三重提示,车要干什么、车要你干什么都能一目了然。

另外,用户首次启用NGP功能前,需要在小鹏汽车手机APP上观看视频并完成测试。有了这个“教程”,用户能快速了解NGP适用范围与操作方式。在复杂路况和弹出不常见提示时,也不至于一头雾水。
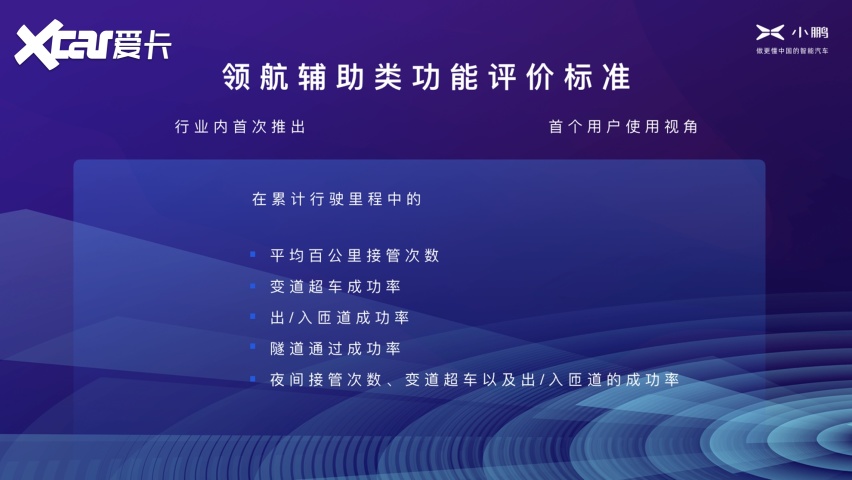
算上这次,特斯拉NOA和小鹏NGP车云菌都是第二次体验。特斯拉总会不时的带来惊悚一刻,小鹏让人安心的多。参考小鹏推出的“领航辅助类功能评价标准”,这些跟用户体验紧密相连的数据,让“能不能战胜NOA?”这个问题没了悬念。相比谁技术先进、算力更强这种账面数据,系统稳定、全场景可用、体验靠谱,才是消费者想要的,也是真正有意义的东西。

车云小结
加入对周围车辆动作的预判能力、开放脱手监测等功能后,现在不算完美的NGP达到 “能上车”的水平了。从工程版到beta版,不到两个月的时间进步幅度超人预期,以这个效率来说,beta版到正式版或许还会有不小的提升。这是车云菌更期待NGP正式版的原因,也希望NGP正式版别辜负咱们的期待。至于NOA、NOP、NGP的初次针锋相对,能否打破“外来和尚会念经”的魔咒,可能比谁更强更有看头。